About Me
Hi, My name is Junchao Ma. I am currently a PhD researcher in the Dynamic Robotics and Control Laboratory, advised by Dr. Quan Nguyen.
Over the past four years, my research has focused on the design and system integration of legged robotic platforms for highly dynamic motion, working across the full stack—from mechanical design and real-time embedded firmware to low-level control and high-level software systems. Building on this foundation, I now leverage reinforcement learning to inform both hardware design and humanoid control, with the goal of developing robotic systems that can operate robustly in complex real-world environments and deliver meaningful societal impact.


I build robots ...

Hector V2
Hector V1
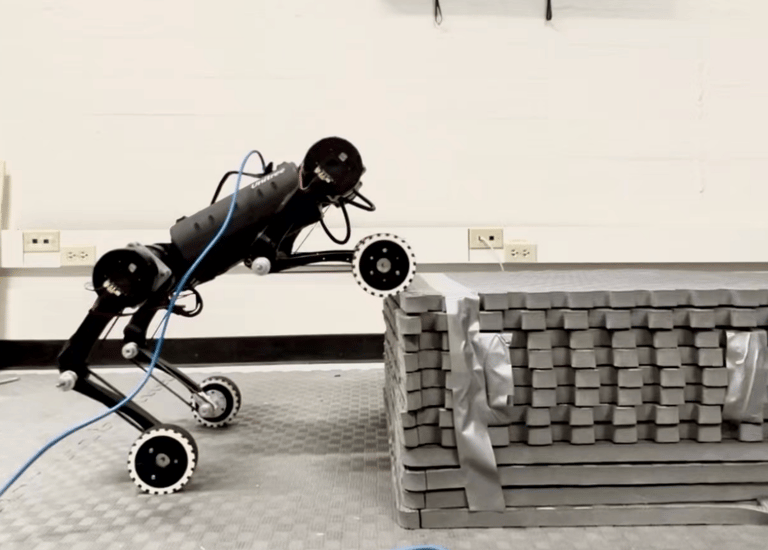
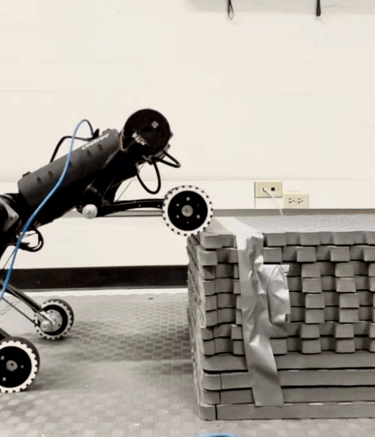
Wheel-legged Quadruped
1-DOF Arm
and make them work




I also dabble with Humanoid Control via RL


Self-developed Platforms
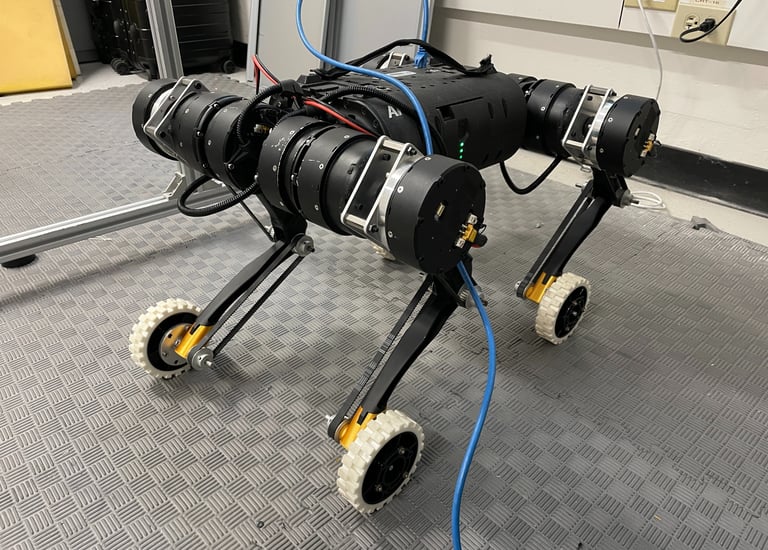
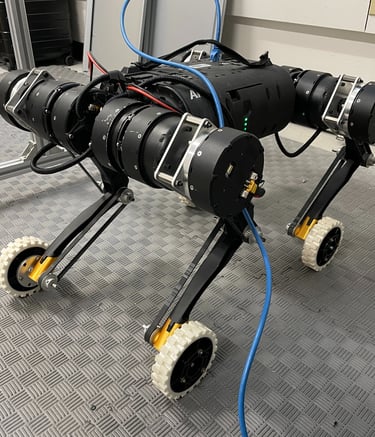
A1 Modified Wheel Legged Robot




HECTOR V1 Bipedal Robot




HECTOR V2 Humanoid Robot


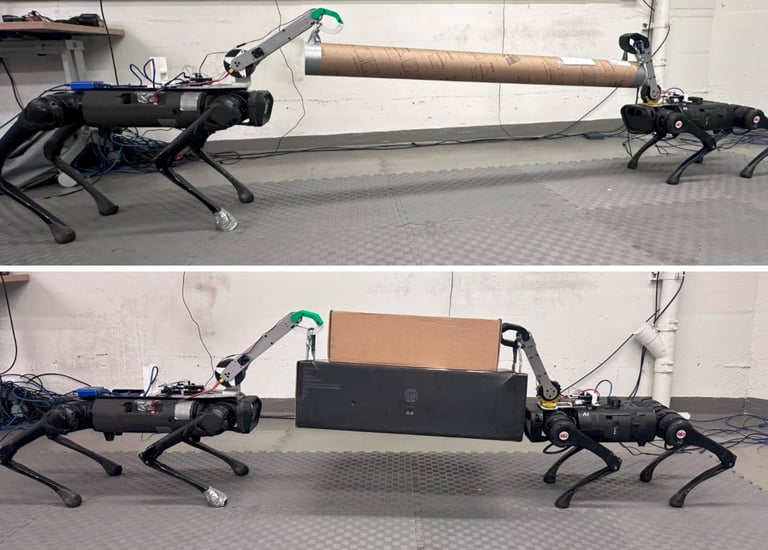

1 DOF Quadruped Arm
Contact
Reach out for internships or collaborations
Phone
junchaom@usc.edu
+1-507-269-9963
© 2025. All rights reserved.